
2024
Game - FIRST® CRESCENDO
Robot - Baseline

2023
Game - FIRST® Charged Up
Robot - Zeus

Swerve Drive
4 camera full-field localization system
Auto-level engage
Custom arm worm gearbox
2022
Game- FIRST Rapid React
Robot- RibbitReact

Compact control system housing
Articulated multi-stage climber
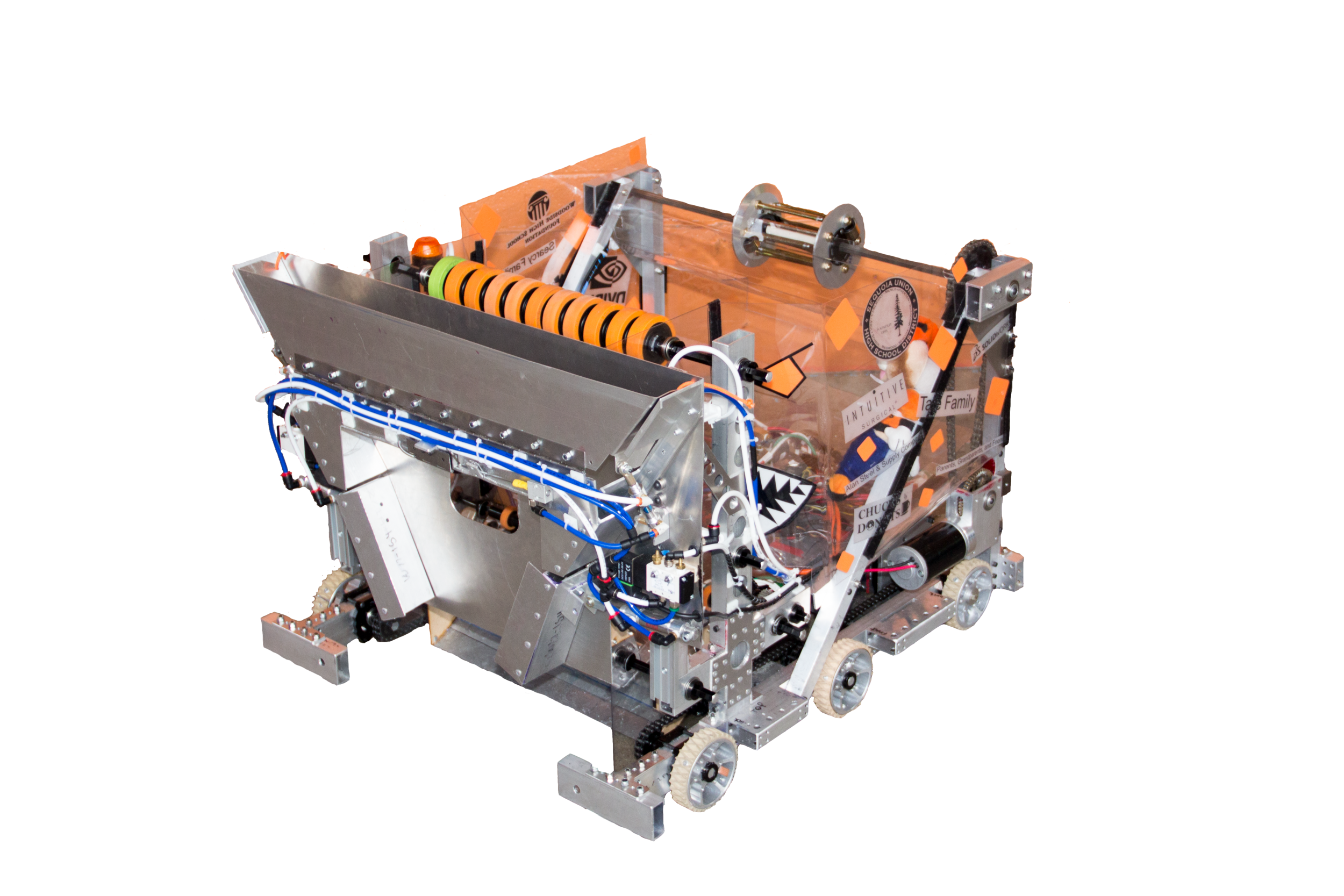
2019
Game- FIRST Destination: Deep Space
Robot- W19-001

Roller cargo intake
Angle-able manipulator
2018
Game- FIRST Power Up
Robot- No Name

- Openable roller intake
- Wrist height adjustment
- Dual moving stage elevator
- Winch climber
2017
Game- FIRST Steamworks
Robot- Cubeasaurus
Inspiration: Is a very cubic robot. Has a mouth (Ball Intake)
2016
Game- FIRST Stronghold
Robot- BALLista

Inspiration: Looks like a Medieval Ballista and launches "boulders "(Foam Balls)
- 4 wheel drive
- Supplementary tank treads for traction
- Weighs: 91 lbs
- 12 treaded wheels
- Lifts portcullis
- Moves Cheval de frise
- Shoots ball into high and low goal
2015
Game- FIRST Recycle Rush
Robot- Slidewinder

Inspiration: The robot had a slide drive, Could move sideways like the Sidewinder Rattlesnake
Fate: Disassembled due to lack of space
- Weighed 118 pounds
- Had a slide drive. But it was removed
- 4 wheel drive, 4 omni-wheels for mobility
- Could lift 3-4 totes and a recycle bin
2014
Game- Aerial Assist
Robot- Ballrus

Inspiration: The robot has tusk-like protrusions, like a walrus
Fate: Fully Intact, Operational
Weighs 112 pounds
6 wheel drive, with the front 2 wheels as omni-wheels for added mobility, belt driven by VexPro shifters
Designed to intake and and shoot the 24' ball
Shooting mechanism exerts up to 200 pounds of force and consists of 4 springs and an archery trigger
Worm gearbox and steel cable pull the trigger to fire the ball up to 50 feet
2013
Game- FIRST Ultimate Ascent
Robot- Orangahang / Mk III



Inspiration: The robot climbs and hangs off pyramids, like an Orangutan and is orange.
- Weighs 113lbs
- Has been called "Mk III" since third iteration
- 4 wheel drive West Coast Drive, with ball casters at the back corners of the robot
- Designed to climb 60 feet up the pyramid
- Four hook setup, designed to be extremely stable while climbing
- 2 wheel shooter
- 4 frisbee storage
- Shoots a frisbee every .75 seconds
- Fed by human player by running the shooter backwards
- Tilts to change shooting angle
- Had 3 iterations (Mk I, Mk II, and Mk III)
2012
Game- FIRST Rebound Rumble
Robot- The Kracken

Inspiration: The intersection of the ball intakes with the transport belt is called the bermuda triangle, and all the belts look like tentacles.
Fate: Dissassembled for parts
Catchphrase: Release the Kraken!
weighed 119 pounds
Ball-intakes on both sides and a 360-degree turret-shooter at the top
The programming is in C++
Built a bridge-pusher to lower bridge
6 wheel tank drive with the middle wheels lower to lower turn friction
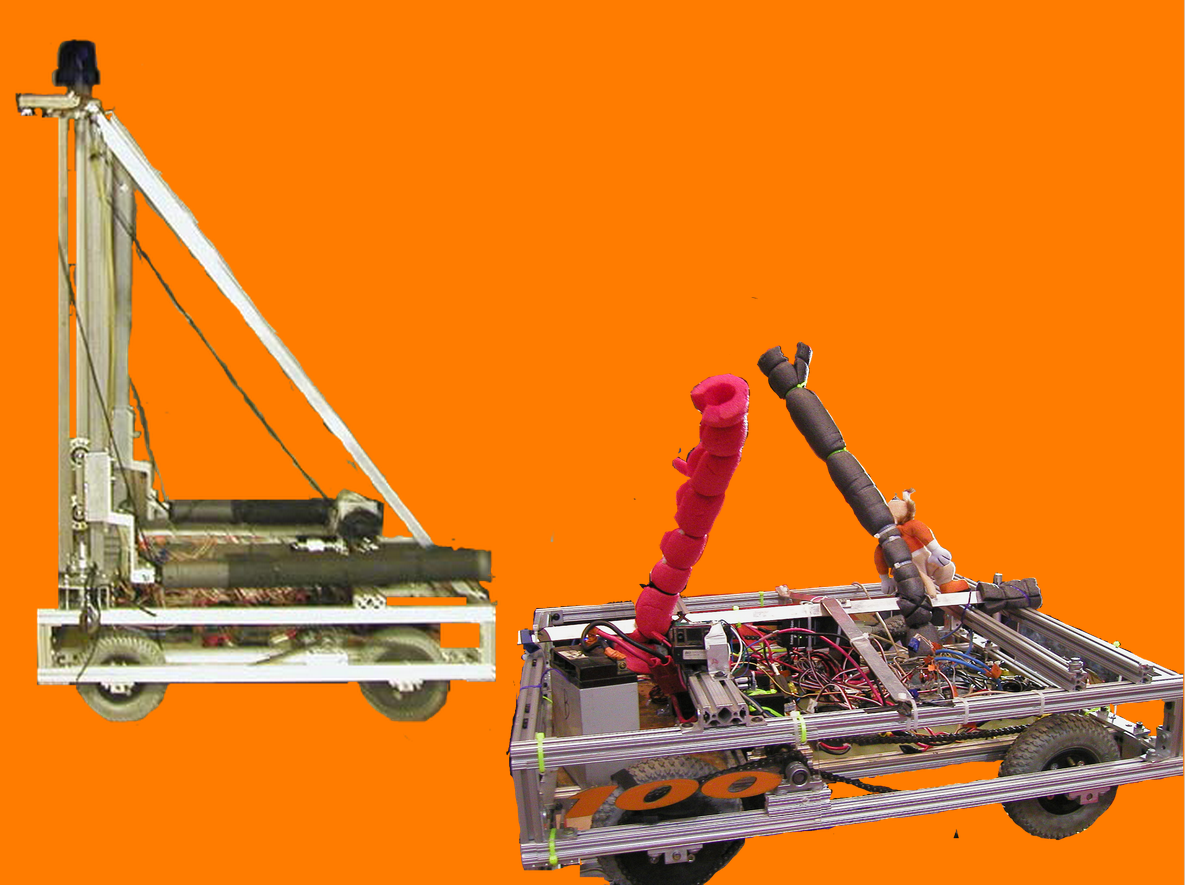
2011
Game- FIRST Logomotion
Robot- G-Wrath

Inspiration:The long arm/neck makes it look like a giraffe.
Fate: Intact, Operational
- weighed 115 pounds
- Similar to Tube-A-Saurus-Rex
- 4 motor drive
- 6 wheels with middle 2 lowered for lower friction turns
- Its arm could be lowered in the front or back of the robot. another feature was that the shoulder motor and worm gear were onthe arm and that assembly rotated around a fixed gear on the robot
- Springs and gas shocks counterbalance the weight of the arm
- Pneumatic wrist allowed head to store within the frame
- The Minibot was deployed on a drawer slide powered by a pneumatic cylinder
- When the Minibot reached the pole it was held in place by magnets. Retracting the deployment arm triggered the power button.
- To detect the distance from the pole tower, we used Sharp Infrared Proximity Sensors GP2Y0A21YK
- The head allowed for manipulation by using 2 independently controlled rollers. One on the top “jaw” and one on the bottom “jaw”.
- The head could suck in a tube by driving the rollers forward and spit it out by driving the rollers backward. It could also rotate the tubes up and down by driving the rollers opposite each other.
- A ring of LEDs around the camera for use with the retro-reflective
- Pneumatics were used for multiple subsystems
- Drive train gear shifting, one solenoid valve and piston for each side of the drive train
- Minibot deployment (move in, move out)
- Wrist deployment - one position for stowing head within robot frame, and the other position for normal tube hanging operation
G-Wrath Minibot

2010
Game- FIRST Breakaway
Robot- Hammerhead

Inspiration: The robot is shaped like the dorsal fin of a shark and it has a hammer-like kicker on the front.
Fate: Intact, Operational
- 4 motor tank drive with omni wheels in the back
- Hanging mechanism was a hook velcroed to the end of the deployment pole. The pole would come up, grab onto the rung, and retract. While the pole retracted, the velcro came off and we would winch ourselves up to the top.
- Winch used a ratchet, it allows movement in one direction but prohibits movement in another.
- Able to hold on to ball while swiveling. Creating a dribble.
- Used vision to detect the ellipses of the targets over the goals.
- We used the size of the largest circle (in pixels) and estimated the distance to the goal to give us the desired kicker power
- The formula seems to be 0.05/(# pixels of the radius of the largest circle) the result limited to lie between 0 and 1 formed the demand for the kicker motor.
- Kicker arm rest position is at about 10 oclock, swings clockwise, and hits the ball at about 7 oclock
2009
Game- FIRST Lunacy
Robot- LunaBeast

Inspiration: The robot is beastly and played the game Lunacy.
Fate: Disassembled due to lack of space
- Robot that fires large quantities of game pieces
- Can hold 12 game pieces and we have a shooting accuracy of about 85%
- To hold the game pieces, our team designed a two-channeled cartridge
2008
Game- FIRST Overdrive
Robot- Ball Frog

Inspiration: The name was a play on words of the Bullfrog, because it held a ball in its mouth, making it look like the large inflated neck of a Bullfrog.
Fate: Intact, missing some components
- Manipulator able to not only hurdle the large trackballs, but which would also be able to place the trackball on the rack
- Was programmed in autonomous, to make it around the track, crossing up to four lines
- Could get ball off overpass
- Elevator to lift and lower balls
2007
Game- FIRST Rack N' Roll
Robot- Tube-A-Saurus Rex

Inspiration: The robots head, the claw/sucker, looked like a mouth, and was then painted with dinosaur teeth.
Fate: Disassembled due to lack of space
- Sucker, which consists of two motors and two rubber belts
- Applied constant pressure to the tube in order to easily suck up and spit out tubes.
- Claw weighed at least 10 lbs
- Instead of the traditional one-pole arm, we welded three metal tubes into triangle shape to give the claw maximum support
- This arm is connected to the tower, which behind its plastic sheets hides a triple–layer electronics cake, designed to take up as little space as possible
- Blend design features from both the tank-drive and the kit-bot
- High shooter mounted on a turret
- Balls would be stored in a large bin and then lifted up a conveyor to the turret
- All gears used in the transmissions were all cut from straight-cut steel spur gear stock, 20 diametrical pitch, 20* pressure angle
- Housing and structure material 6061-T6 aluminum
- Six-wheel-drive skid-steer layout. For wheels, 6” Skyway Caster wheels would be used in conjunction with the hub-kits provided by FIRST in the kit of parts.
2006
Game- FIRST Aim High
Robot

Fate: Disassembled for parts
2005
Game- FIRST Triple Play
Robot

Fate: Disassembled for parts.
- Has a crane like arm
2004
Game- FIRST Frenzy
Robot

Fate: Disassembled for parts
2003
Game- FIRST Stack Attack
Robot
Fate: Disassembled for parts
2002
Game- FIRST Zone Zeal
Robot

Fate: Disassembled for parts
2000
Game- Co-operitition FIRST
Robot

Fate: Disassembled for parts
1999
Game- FIRST Double Trouble
Robot- Terminator

Fate: Disassembled for parts
1995
Game- FIRST Ramp N' Roll
Robot- Stealth

Fate: Disassembled
- Championships Winner
- Our first robot